Engineers at the Harvard John Paulson School and Wyss Institute have been working on tiny flying robots for over a decade. Their project first achieved flight in 2007. Now the tiny Robobee has gone a step, or a stroke, further and managed to become "the first-ever aerial and aquatic capable insect-scale robot".

According to the Wyss Institute blog, engineers have tried without success for decades to design "design functional aerial-aquatic vehicles". This is down to the conflicting design requirements, we are told. However, nature can take on and gracefully meet this challenge. So, inspired by puffins, the scientists endeavoured in theoretical, computational and experimental studies to see how they could adapt the Robobee's piezoelectric actuator powered flapping to become swimming.
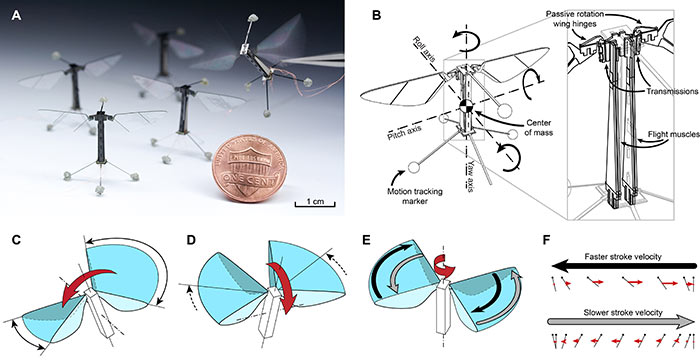
As you can see from the video above, the Robobee, can hover like an insect. In air it beats its wings about 120 times a second. To enter the water, first it has to orient itself, quit flapping and fall down, breaking the surface tension of the water to become submerged. That's not so simple, as the Robobee is so light, and smaller than a paperclip. Now the Robobee has to angle its wings slightly differently, and drastically reduce its flapping speed to 'swim'.
Evidently the Robobee isn't as graceful as a Puffin, in the demonstrated actions. Also once in the water it doesn't have a mechanism to regain flight. Nevertheless what the scientists have learned has "the potential to be adapted to larger aerial-aquatic robotic designs". Larger designs could work without being tethered as they could carry enough 'fuel' to travel independently.
According to Wikipedia the ultimate goal of the Robobee project is "to make colonies of fully autonomous and wireless RoboBees". It is currently limited, as suggested previously, by battery technology and by not having any built-in 'brain'.